Колесные, «рукастые» и летающие роботы объединяются, чтобы… таскать книги с полки.
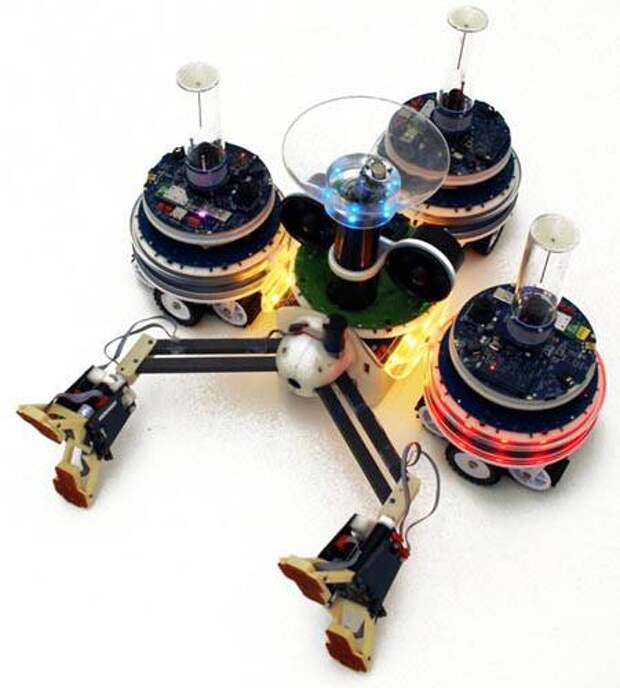
Hand-Bot и три Foot-Bot’а
Работу по созданию подобных команд европейские ученые ведут в рамках масштабного проекта Swarmanoid. Создавая небольшие аппараты различной конструкции, способностей и предназначения, разработчики добиваются от них активного взаимодействия для выполнения различных задач. Одной из них и стала задача по «воровстве» книги с полки – над все более совершенным ее исполнением авторы и их роботы трудятся уже с 2009 г.
, но лишь недавно им удалось достичь впечатляющего результата, показанного в ролике, который получил награду за лучшее видео на конференции 2011 Artificial Intelligence, прошедшей в Сан-Франциско.
В команде участвуют три вида роботов – Hand-Bot, Foot-Bot и Eye-Bot. Первые оснащены довольно ловкими манипуляторами для захвата предметов, которые также позволяют им карабкаться по вертикали. Помогает этому и прочный шнур, прикрепленный к магнитному крюку, который выстреливает вверх и, крепко удерживаясь на потолке, дает роботу возможность подниматься и опускаться, слегка контролируя процесс с помощью вентиляторов. Однако самостоятельно перемещаться по горизонтальному полу они неспособны; для этого в команде есть отдельные специалисты – Foot-Bot’ы. Двигаясь на колесах, они пользуются парой видеокамер и круговых ИК-сенсоров для ориентации. Наконец, третья профессия в этой группе – Eye-Bot. Они также оснащены камерами и ИК-датчиками, а еще – сонарами, а главное – способны летать и прикрепляться к потолку, оставаясь неподвижно нужное время. Их задача – поиск и обнаружение объекта.
Итак, все начинается с того, что группа Eye-Bot’ов вылетает на поиск, время от времени останавливаясь и, удерживаясь за потолок, осматриваясь по сторонам.
Когда один из них обнаруживает искомый книжный шкаф, он сообщает об этом по цепочке Eye-Bot’ов, которые к тому времени образовали целую сеть коммуникаций. Сигнал в конце концов прибывает на «базу», где его ждут Hand-Bot’ы и Foot-Bot’ы.
Впрочем, лучше все просто увидеть: